The Visca Server IO creates an Visca over IP endpoint, so that SP can be controlled from a Visca based PTZ controller.
Setup the Visca Server Connection
Add the Visca Server IO within the IO Connections.

define the port and the local interface which should be used for the connection to a PTZ controller
Define the joystick ranges before using the connection
Different Visca controller have different joystick “resolutions”.
These needs to be ranged before the connection can be used.
1. Check Range
Bring the joystick to the a max. pan/right position.
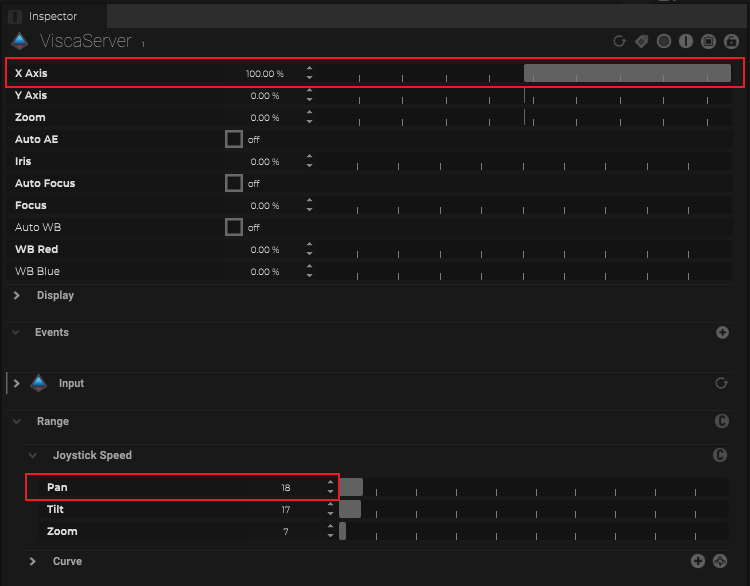
Monitor the “X Axis” value.
If the “X Axis” is 100% following with step 2.
If the “X Axis” is < 100% following with step 3.
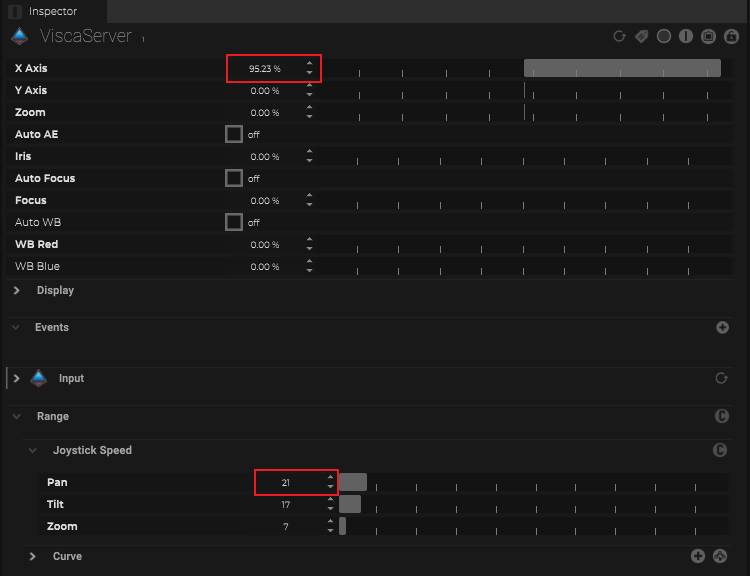
2. Find the range limit
Release the joystick and reduce the “Pan” range value.
Bring the joystick back to the max. Pan/Right position.
Repeat that until the “X Axis” value is lower then 100%.
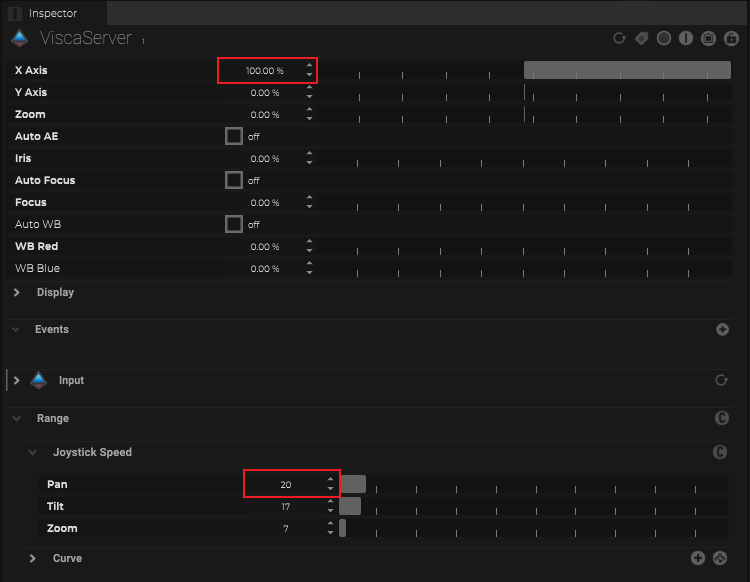
3. Define the range
Release again the joystick an increase the “Pan” range value by one.
Bring the joystick back to the max. Pan/Right position.
Repeat that until the “X Axis” value is exactly 100%.
4. Range the other axis and the zoom
Repeat the above steps with the Tilt/Up and the Zoom.
Map In
Joystick for PTZ Cameras (Sony and Panasonic)
This allows a VISCA joystick to control a PTZ camera inside SP
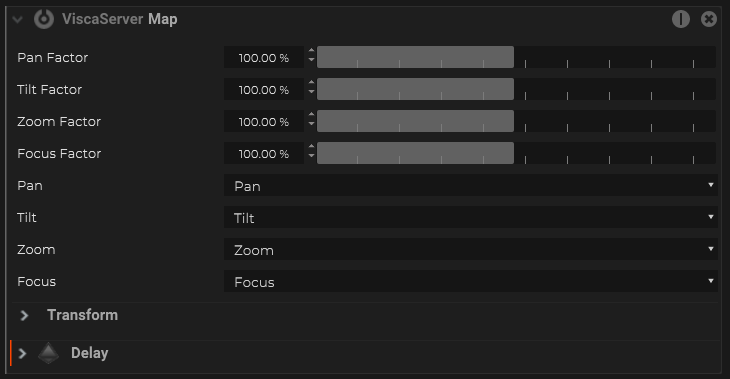
The different “Factor” parameter define how much the joystick or zoom rocker affects the object parameter.
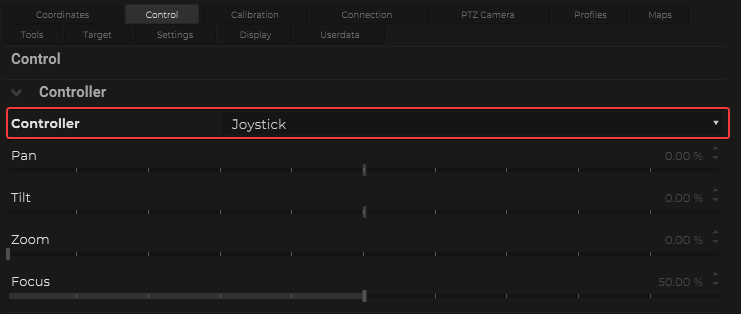
*For this Joystick Map input to work properly and be driving the SP PTZ camera, it is important that the Controller mode under the PTZ camera is set to Joystick as well.
Target Object
A Target Object a Tracker, Target or a Target frame can have a direct map input from the Visca Server connection.
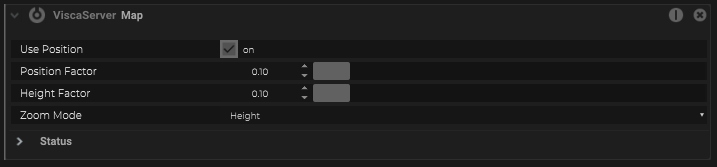
The different “Factor” parameter define how much the joystick or zoom rocker affects the object parameter.
The zoom from the PTZ controller can be linked to different object parameters:
- Target Height
- Target Size
- Target Focus
Access other controller parameter
Within the Visca Server IO Connection multiple other controller functions/parameter are available.
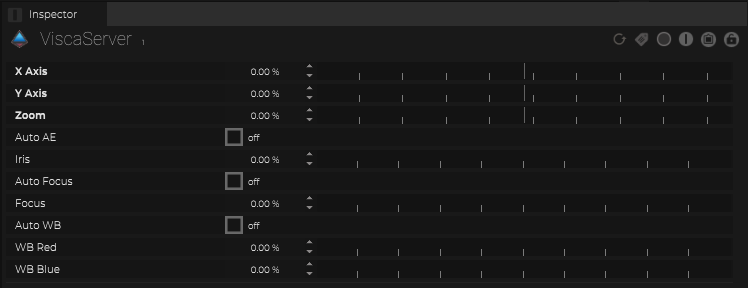
This parameter can be used as node within the board by simply drag and drop these into one.