
RossTalk is a plain text based protocol that allows control of the Ross Ultrix Router an external device.
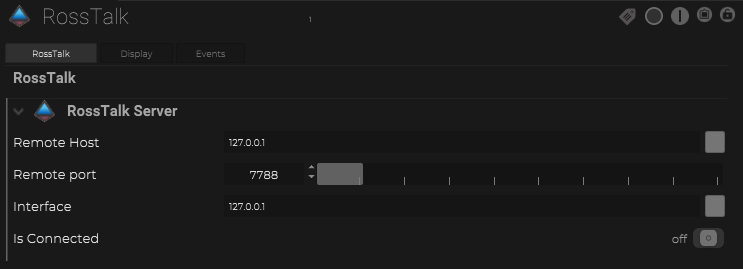
RossTalk Setup
| Name | Description |
|---|---|
| Remote Host | This is where the IP address of the server can be added. |
| Remote port | This is the port that the data package will be sent to. |
| Interface | This is the IP address of the local network interface (NIC) which should be used for this connection. |
| Is Connected | When on, the device is connected. |
Trigger Maps
Trigger Maps can be called among other things within interface objects like Buttons, Dropdowns, Timeline Trigger Layer, Areas, Nodes, and many more. There are 4 types of trigger maps available for RossTalk.
Custom Command

Use to send a custom Ultrix command
Ultrix GPI / Call Salvo

Use to fire specific salvo.
Ultrix Switch
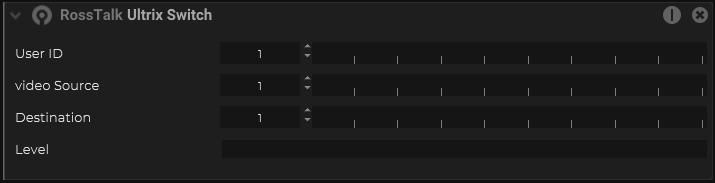
Use to request video source be selected on destination for specific levels coming from User ID
| Name | Description |
|---|---|
| User ID | ID of the user for which the request is coming from |
| Video Source | The source of the video |
| Destination | The destination of the video |
| Level | Multiple levels are possible with a separation by a comma with no spaces and can include ranges. This is an optional |
Ultrix Timer

| Name | Description |
|---|---|
| Timer | ID of the timer |
| Function | Have the option to
|