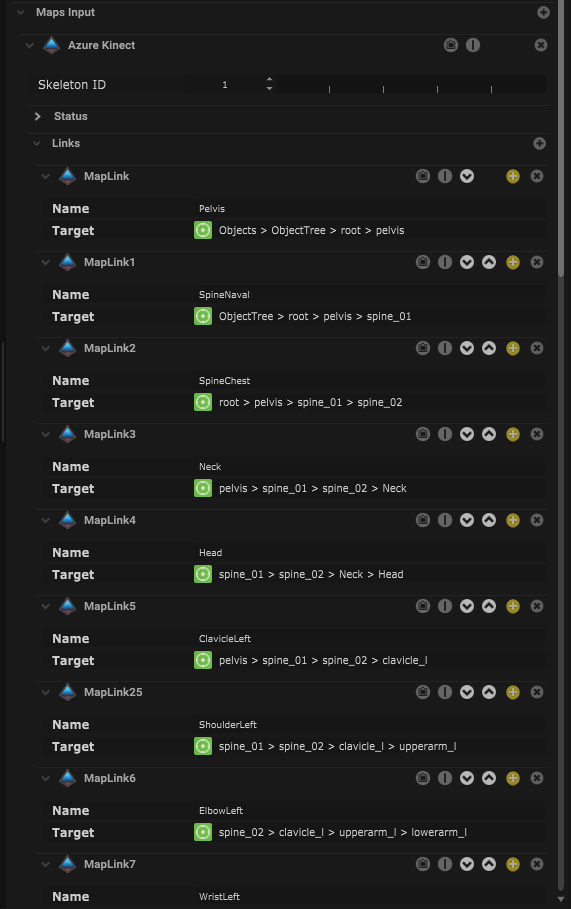
- A Map Input is necessary within the JointGroup object to drive the Joints.
- Each Joint which should be “driven” by an input need an MapLink. These link can be added with a click on the (+).
- The correct link to the input device needs to be set with the correct name string. See below…
- Each MapLink need now the connection to the Joint. This needs to be done with the target field.