The Kinetic driver is a virtual “Rope/Hoist-System”.

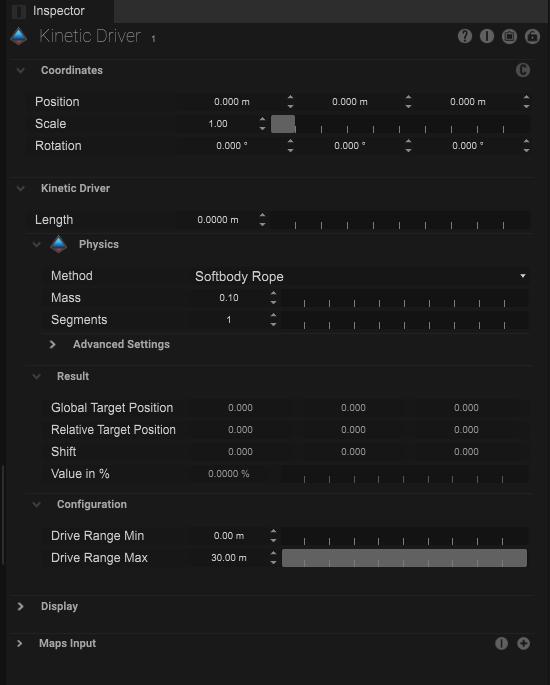
Coordinates
| Name | Description |
|---|---|
| Position | This will move the object along X, Y and Z axis in the local space. |
| Scale | Scale of the coordinate system. To scale the Object check the settings under “Display” |
| Rotation | Rotation of the object along X, Y and Z axis. |
Kinetic Driver
| Name | Description |
|---|---|
| Length | Length of the Kinetic Driver (rope/chain lenght) |
Physics
| Name | Description |
|---|---|
| Method |
|
| Mass | The mass of the Kinetic Driver |
| Segments | The segment amount of the Kinetic Driver |
Configuration
| Name | Description |
|---|---|
| Drive Range min | define the minimum “drive” value (effects Length) |
| Drive Range max | define the maximum “drive” value (effects Length) |