This is the input protocol for PosiStageNet data which is positional tracking data of objects.
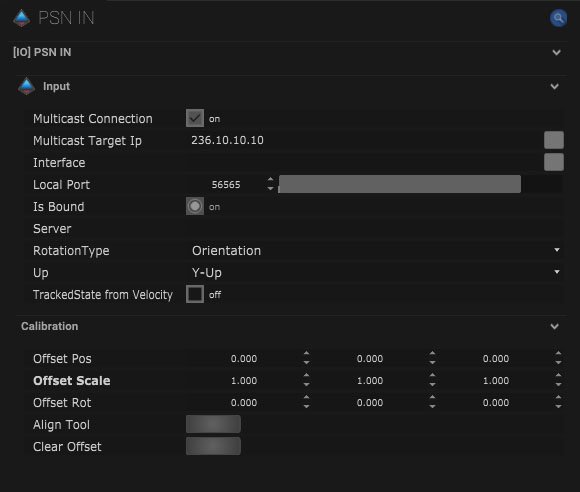
PSN IN Setup
Input
| Name |
Description |
| Multicast Connection |
When on, data can be sent to multiple recipients. |
| Multicast Target IP |
This is where the IP address of the multicast can be entered. |
| Interface |
This is the IP address of the local network interface (NIC) which should be used for this connection. |
| Is Bound |
This will be on when the IO connection is bound to a network. |
| Server |
Server name will be displayed here when connected. |
| Rotation Type |
- Orientation – This rotation type correlates to the points of a compass.
- Euler – This rotational type is relevant to a rigid body rotating on a single axis point.
|
| Up |
- Y-Up – When this is selected the Y-axis will be up.
- Z-Up – When this is selected the Z axis will be up.
|
| Tracked State from Velocity |
When on the velocity will have an impact on the tracked state. |
![]()
*Check the Calibration/Allignment Tool here.
*Check the Sync Tools here.
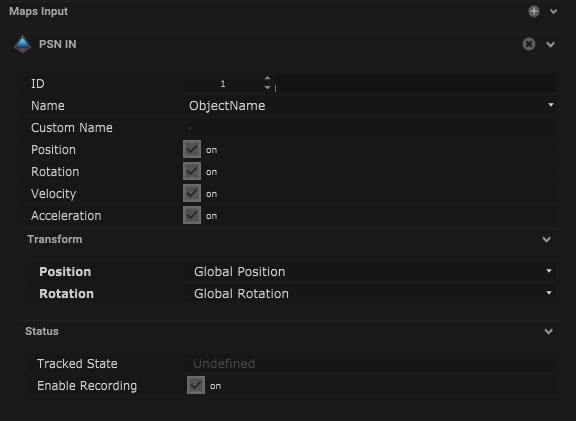
PSN IN Mapping
| Name |
Description |
| ID |
This is the ID number of the incoming data. |
| Name |
- Object Name – The input will look for the object name.
- ID – The input will look for the ID number.
- Custom – The input will look for the custom incoming name.
|
| Custom Name |
A custom name can be manually added here. |
| Position |
When on, the incoming position data will be used. |
| Rotation |
When on, the incoming rotation data will be used. |
| Velocity |
When on, the incoming velocity data will be used. |
| Acceleration |
When on, the incoming acceleration data will be used. |
Transform
| Name |
Description |
| Position |
- Global Position – The object will be affected by the global position of the data.
- Relative Position – The position of the object will be relative to the tracking data.
|
| Rotation |
- Global Rotation – The object will be affected by the global rotational data.
- Relative Rotation – The rotation of the object will be relative to the tracking data.
|
Status
| Name |
Description |
| Tracked State |
- Undefined – When tracker does not have a map input.
- Inactive – When the tracker has a follow object input map.
- Active – When the tracker has a target object map input.
|
| Enable Recording |
When on, position data can be recorded and used. |
![]()
Compatible input objects