
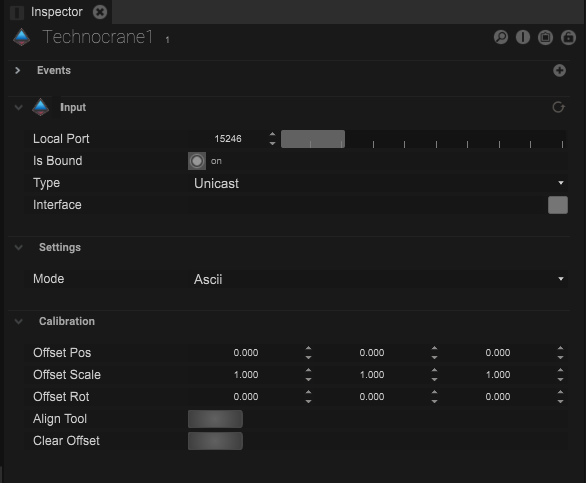
The Technocrane is a camera crane system, this is the input for the crane tracking system.
Input
| Name | Description |
|---|---|
| Local Port | This is the port that will receive data from other devices. |
| Is Bound | This will be on when the IO connection is bound to a network. |
| Type |
|
| Interface | This is the IP address of the local network interface (NIC) which should be used for this connection. |
Mode
| Name | Description |
|---|---|
| Mode |
|
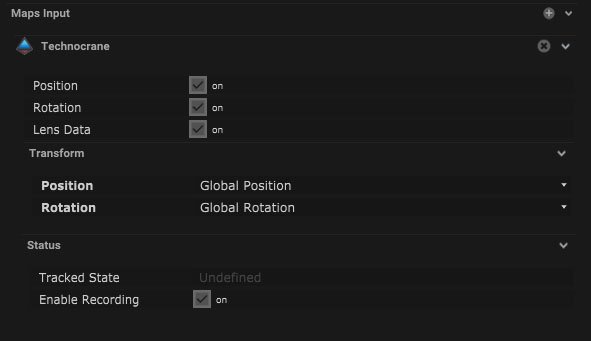
Technocrane Mapping
With an Map Input the Data of this IO will be mapped into the defined object,
Maps In
| Name | Description |
|---|---|
| Position | When on, the incoming position data will be used. |
| Rotation | When on, the incoming rotational data will be used. |
| Lens Data | When on, the incoming lens data will be used. |
Transform
| Name | Description |
|---|---|
| Position |
|
| Rotation |
|
Status
| Name | Description |
|---|---|
| Tracked State |
|
| Enable Recording | When on, the input data can be recorded. |
Compatible Input Objects
Node
A Technocrane IO Node can be added to acces the data inside the board.

| Name | Description |
|---|---|
| Zoom | Zoom value |
| Iris | Iris value |
| Focus | Focus value |
| Track Position | Jib position on the track |
| Telescope | value of the telescope arm |