This is a positional tracking system that is able to track XYZ position and rotation. It is a UWB based system.
*This is only available for Tracking, Light Tracking, and Full license.
Kinexon Setup
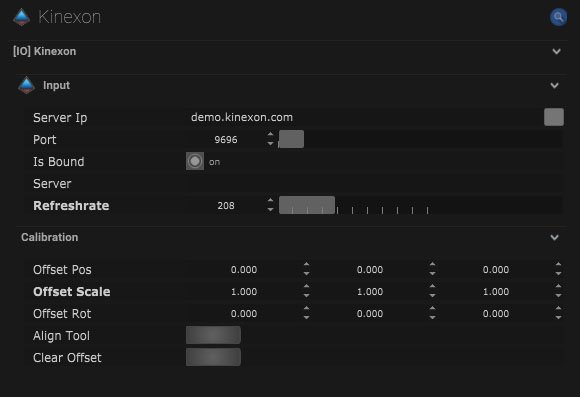
Input
| Name |
Description |
| Server IP |
This is where the IP address of the server can be added. |
| Port |
This is the port that will receive data from other devices. |
| Is Bound |
This will be on when the IO connection is bound to a network. |
| Server |
Server name will be displayed here when connected. |
| Refreshrate |
The refresh rate of the data can be changed, the higher the refresh rate the smoother the input data will be. |
![]()
*Check the Calibration/Allignment Tool here.
Mapping
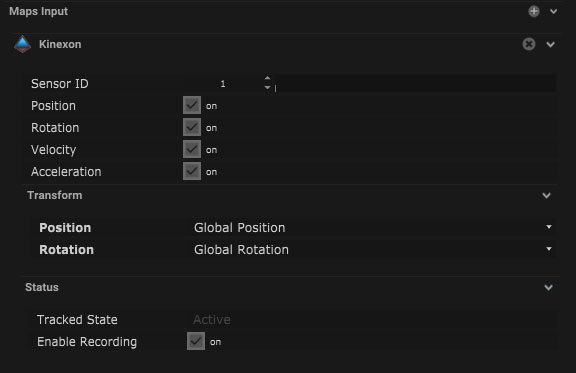
Input
| Name |
Description |
| Sensor ID |
This is the ID number of the tracking point. |
| Position |
When on, the position of the object will be affected. |
| Rotation |
When on, the rotation of the object will be affected. |
| Velocity |
When on, the velocity of the object will be affected. |
| Acceleration |
When on, the acceleration of the object will be affected. |
Transform
| Name |
Description |
| Position |
- Global Position – The global position will be output.
- Relative Position – The relative position will be output.
- Global Effected Position – The global effected position will be output.
|
| Rotation |
- Global Rotation – The global rotation of the object will be output.
- Relative Rotation – The relative rotation will be output.
- Global Effected Rotation – The global effected rotation will be output.
|
Status
| Name |
Description |
| Tracked State |
- Undefined – When tracker does not have a map input.
- Inactive – When the tracker has a follow object input map.
- Active – When the tracker has a target object map input.
|
| Enable Recording |
When on, the tracking data can be recorded. |
![]()
Compatible input objects